Gradient-based-Topology optimization (TO)
Topology optimization (TO) method based on homogenization applied to design a 1D dielectric metagrating deflecting a normal polarized incident wave (deflected angle= 60°, wavelength=0.9 mu m).
Gradient-based-Like Geometric parameters optimizer (GBL)
Classical gradient-based-Like (GBL) optimizer
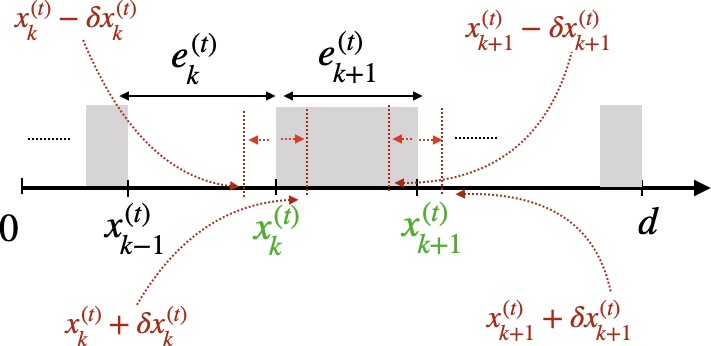
In the proposed geometric parameters optimization method, the increment increasing favorably the FOM is kept as the best current optimal profile.
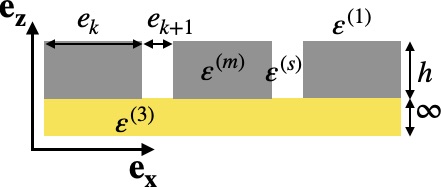
The proposed gradient-based-like (GBL) geometric parameters optimizer, enables efficient design of both periodic and aperiodic metasurfaces. In the case of 1D devices, the structures are built from nanorods whose widths and positions are to be adjusted. The algorithm is then performed by continuously modifying the nanorods widths and locations.
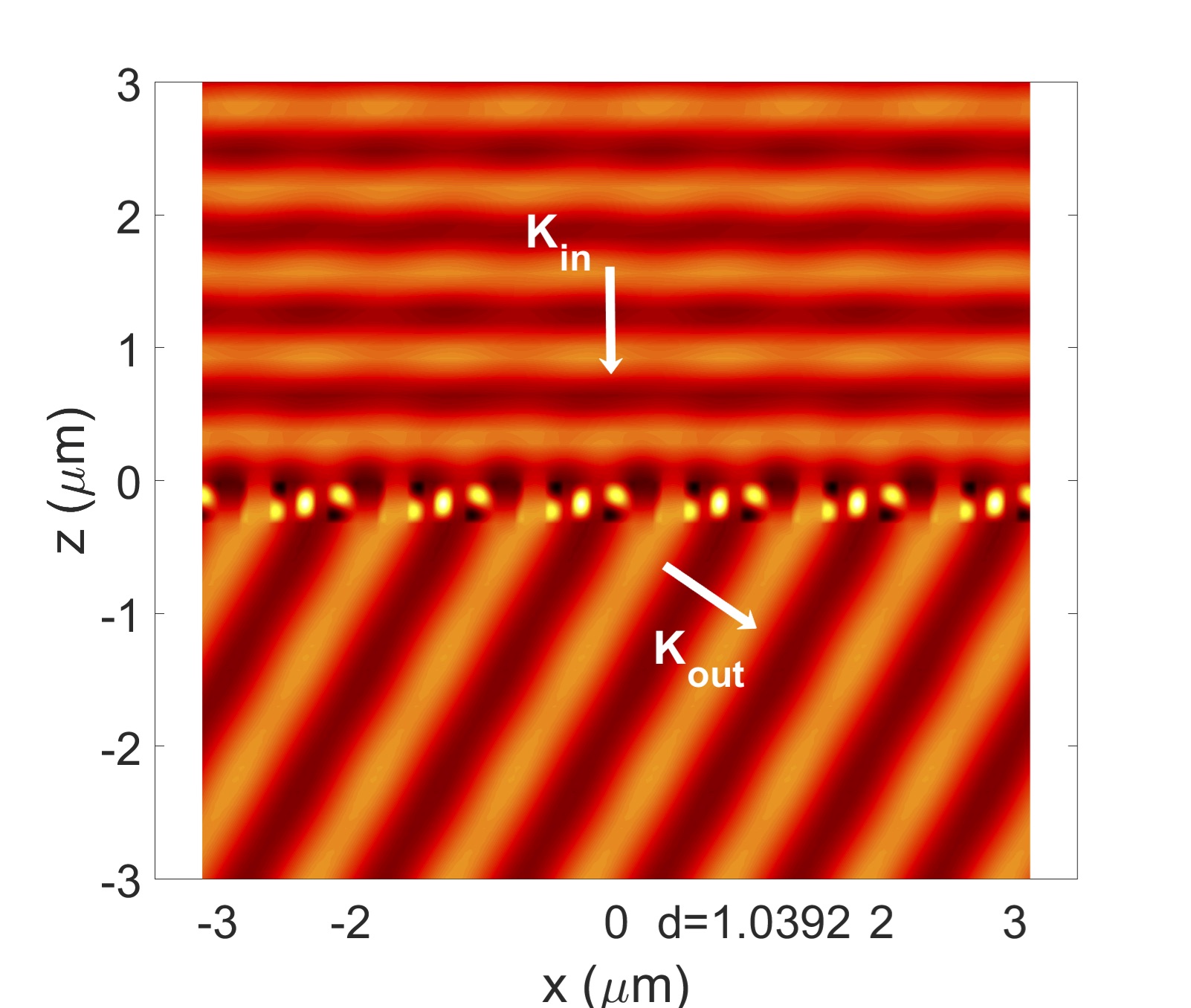
Application to the inverse design of a 1D deflectors
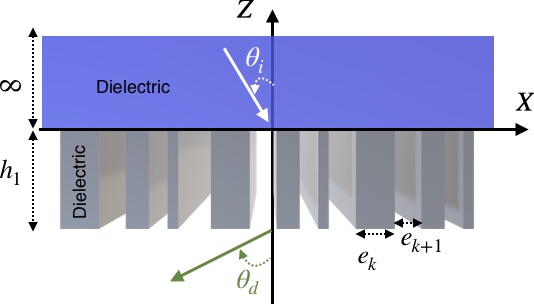
Inverse design of 1D metagratings , that deflect a normally-incident TM-polarized plane wave, with wavelenght lambda=0.9mu m onto a particular transmitted angle of 60°. The optimized device consists of Si-nanorods with refraction index 3.6082, deposited on a SiO_2 substrate ( 1.45). The grating's height is set to h=0.325 mu m
Biomimicry gradient-based optimizer
A wolf-pack hunt can be viewed as a multi-agents system in which each wolf chases a prey accounting for the fitness of each agent participating in the hunt. The main rule controlling the movement of each wolf in the whole pack is not to rely on a predefined hierarchy in the group but, from this collective behavior, emerges a spontaneous hierarchy based on the fitness of each agent to achieve the task properly by accounting for the locations of the other members, with respect to the prey's position. This assumes that, at each phase of the hunting process, each agent, while being autonomous, is able to access and process main information concerning its own position and also the positions of the other agents, with respect to the prey's location. This information is provided by computing, with two simulations: a forward and backward propagations, the variation of the FOM. Once the sequence of fitness is evaluated, it is sorted from most sensitive agent to the least and categorized into three chasing-teams as follows by considering the fitness evaluation criteria. https://doi.org/10.3390/app11125436
Application to plasmonic metalenses inverse design
Design of plasmonic metalenses consisted of a perforated metal film, capable of focusing a normally incident TM plane wave (lambda=0.637 micrometer). The perforated film with a height of 400 nm is deposed on a SiO_2 substrat. The devices is made of Np elements (nanorods + nanoslits).
Far field focusing: focal length =15 lambda
Near field focusing: focal length =3 lambda

Augmented Harris Hawkes optimizer (HHO) with GBL
HHO-GBL is a hybrid optimization method for the inverse design of metasurfaces, which combines the original Harris hawks optimization (HHO) with a gradient-based optimization method. The HHO is a population-based algorithm that mimics the hunting process of hawks tracking prey. In one hand the original HHO algorithm performs poorly in the exploitation phase and may get trapped and stagnate in a basin of local optima. In the other hand, the main drawback of the GBL optimization method is its strong dependence on initial conditions. However, like any gradient-based 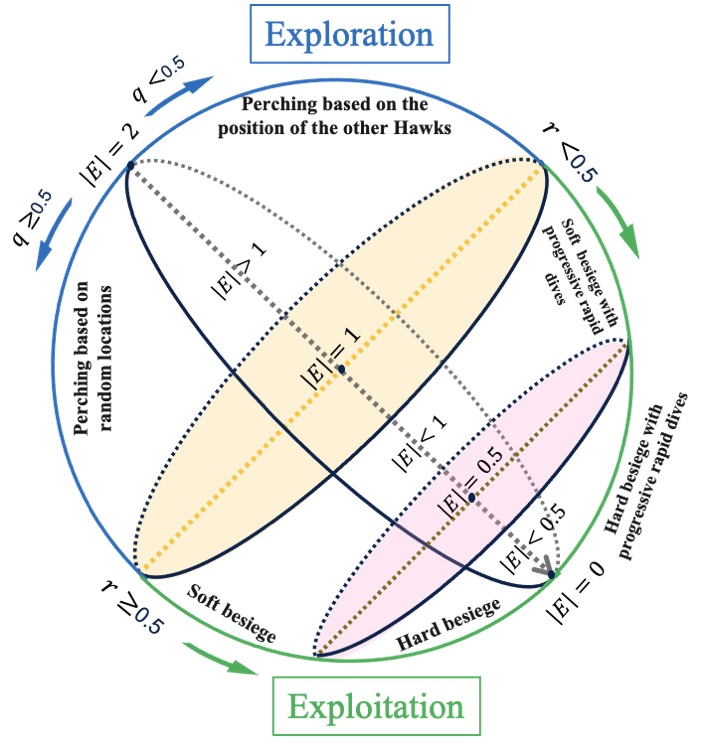 method, GBL has the advantage of broadly and efficiently spanning the design space at the cost of computation time. By leveraging the strengths of both methods, we provide an optimal scenario for efficiently targeting a class of unseen good global optimal solutions. https://doi.org/10.3390/biomimetics8020179
method, GBL has the advantage of broadly and efficiently spanning the design space at the cost of computation time. By leveraging the strengths of both methods, we provide an optimal scenario for efficiently targeting a class of unseen good global optimal solutions. https://doi.org/10.3390/biomimetics8020179
Slime mold algorithm for topology optimization
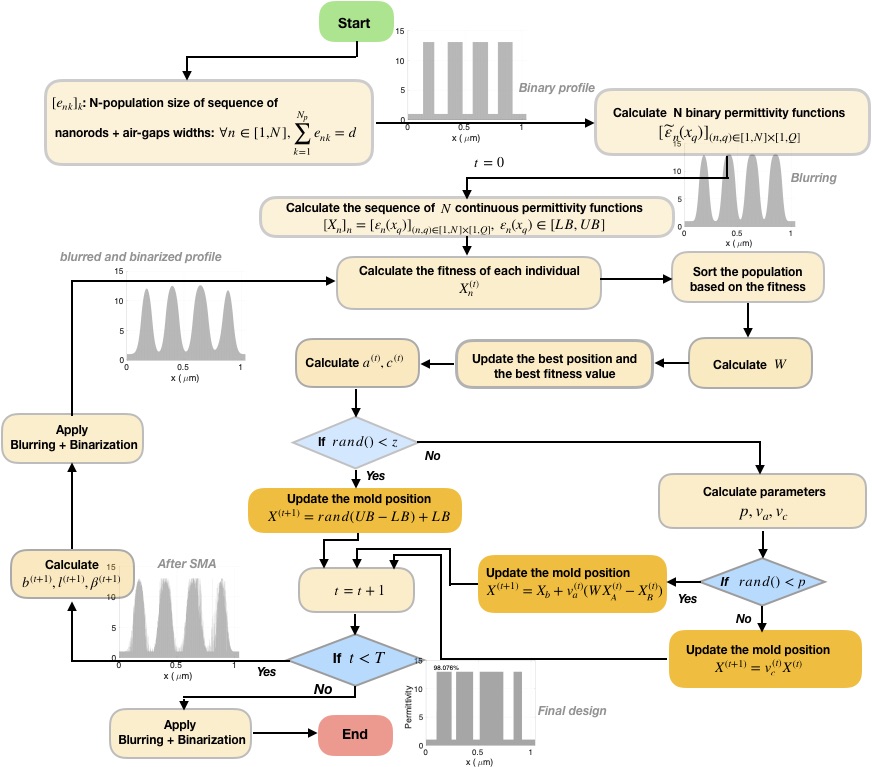
https://link.springer.com/article/10.1007/s42452-024-05694-8
Recent Comments